Add Merge Skip Blending strings Documentation |
||
|---|---|---|
| .github/workflows | ||
| .tx | ||
| scripts | ||
| source | ||
| .gitignore | ||
| Makefile | ||
| README.md | ||
| make.bat | ||
| requirements.txt | ||
| requirements_prod.txt | ||
README.md
OpenDroneMap Docs
Contribute to OpenDroneMap's documentation!!! Anyone is welcome to share their knowledge and improve our documentation. 🎉 And it's pretty simple too!
"But I don't know if I can contribute"
Even if you think your contribution might not be valuable, it might be for other users! If you discovered something remotely useful to you, it probably is very useful to others! :)
Tips, tricks, hacks, datasets, lessons learned, best practices, every bit helps. We want to know! Share it.
How To Make Your First Contribution
If you don't have a GitHub account, register first. It's free and GitHub is awesome !!!
Once you have an account there are two ways to contribute. One is quick for small changes, the second takes a bit longer to setup but makes writing long parts of documentation much quicker.
The Quick Method
Browse to https://github.com/OpenDroneMap/docs/tree/publish/source. Each row in the table corresponds to a page in the documentation. Tap on the file name, in the second (2nd) column from left. Press the "Edit" icon.

Make your changes, then scroll down and tap the "Propose Changes" button.
When the next page is displayed, tap the "Create pull request" button. Wait for your changes to be approved! That's it!
You may want to read the English Style Guide for github https://github.com/raywenderlich/english-style-guide.
The Pro Method
For quick changes the method above is quick and fast. But if you want to write docs like a pro, in your own text editor of choice, follow these steps.
Depending on your operating system, you should follow these steps to create a local copy of the documentation. This way you can modify and check the results before sending them for review.
You may want to read the English Style Guide for github https://github.com/raywenderlich/english-style-guide.
Step 1. Make a Copy (fork) This Repository
Press the "Fork" button at the top of this page.

Step 2. Install Git and Python 3
As there is an issue with python3.13 (https://github.com/ethereum/s……olidity/issues/15811) with python3.12 at most should be used.
Linux:
sudo apt-get install -y git python3 python3-pip
MacOS
We recommend to use Brew for installing Python3.
brew install python3
Git comes preinstalled on MacOS.
Windows
Download Git from https://git-scm.com/download/win and Python 3 from https://www.python.org/downloads/windows/
Step 3. Make A Local Copy of The Documentation
Open a Terminal (or a command prompt). In Windows you open a command prompt by pressing the Window Key and typing "Command Prompt" then Enter.
Then run (replacing "yourusername" with your GitHub username):
git clone https://github.com/yourusername/docs
If it's your first time using git, also run:
git config --global user.name "Your Name"
git config --global user.email "your@email.com"
With your information. So that we can credit the contributions to you.
Step 4. Get The Documentation Running
From the same Terminal (or command prompt) run the following:
cd docs/
python3 -m venv .venv
source .venv/bin/activate
# Linux/Mac
source .venv/bin/activate
# Windows
.venv\scripts\activate
pip install -r requirements.txt
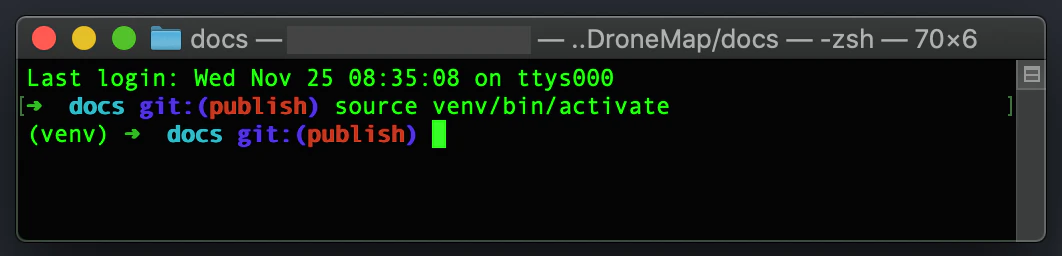
After running source .venv/bin/activate there should be some indication that the Python virtual environment is active (see the (.venv) that appears at the start of terminal prompt in the screengrab below). Note: The next time you can cd into the docs folder and just run source .venv/bin/activate. There should be no need to rerun the pip install and python3 -m venv .venv commands.
Note: If you've installed sphinx on your system, you may run into issues with commands using that version instead of the version inside your virtualenv.
Then if there are no errors, run:
make livehtml
Note that if WebODM is running you should temporarily stop it while you edit the documentation.
Step 5. Start Editing
You can now open a web browser to http://localhost:8000 and see the documentation!
You can use a text editor to edit the .rst files in the "source" folder (for example, Visual Studio Code).
As soon as you make a change to one of the files, your web browser will reload the documentation with the new changes!
Step 6. Publish Your Changes
Open a Terminal (or command prompt) and type:
cd docs/
git commit -a -m "A description of my changes"
git push origin publish
You will be prompted for your GitHub credentials.
Step 7. Open a Pull Request
Open https://github.com/OpenDroneMap/docs and you'll see a box asking you to open a pull request. Open a pull request by filling in a description of your changes and you're set! Somebody will review your changes and your contribution will be live on https://docs.opendronemap.org once approved.
Options and Flags
Any additions or edits to the Options and Flags on https://docs.opendronemap.org/arguments/ need to happen to the /source/arguments_edit/*.rst files.
The /source/arguments.rst file is a list of all options and flags currently available in the ODM code. It is automatically created by running scripts/extract_odm_strings.py (you can use make autogenerate to run the script) and should not be manually edited. To change the descriptions within the list, the ODM code must be modified. Any manual changes to this file will be overwritten when it is next autogenerated. The script also autogenerates a file for each argument with any information available in the ODM code. These *.rst files are in /source/arguments/ and should not be manually edited.
The script creates a blank *.rst file for each argument in /source/arguments_edit/. Additional details may be added to these file and will be merged with the information available in the ODM code when the documentation site is published.
Translations
Contributing translations
Transifex has a getting started guide for translators that will walk you through the steps to setup an account.
The ODM documentation Transifex project can be found at: https://app.transifex.com/americanredcross/opendronemap_docs/
The documentation uses a formatting known as reStructuredTest (reST) to add links, formatting, and other styling. reST uses plain text to annotate the documentation and identify to the system how to process the different page items. Unfortunately, the translation management process doesn't hide the reST markup. It is important that you keep the reST markup when translating.
There are special characters used for:
- Italic
- Bold
- Links
- Code (Additionally, code snippets should NOT be translated - only translate the surrounding words.)
Italic
An `italic section of text` will have a single backtick on either side.
An *italic section of text* may also have a single asterisk on either side.
Italic text needs to have a space before, then a backtick or grave accent (`) that touches the first character of the italic text, then the italic text, then a backtick or grave accent (`) that touches the last character of the italic text, then a space. The backticks may also be asterisks.
![]()


Bold
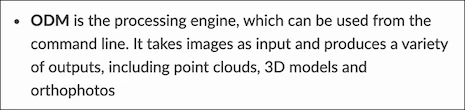
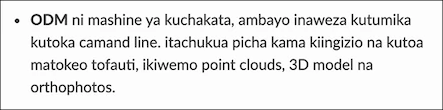
A **bold section of text** will have double asterisks on either side.
Bold text needs to have a space before, then a double asterisk (**) that touches the first character of the bold text, then the bold text, then a double asterisk (**) that touches the last character of the bold text, then a space.
![]()
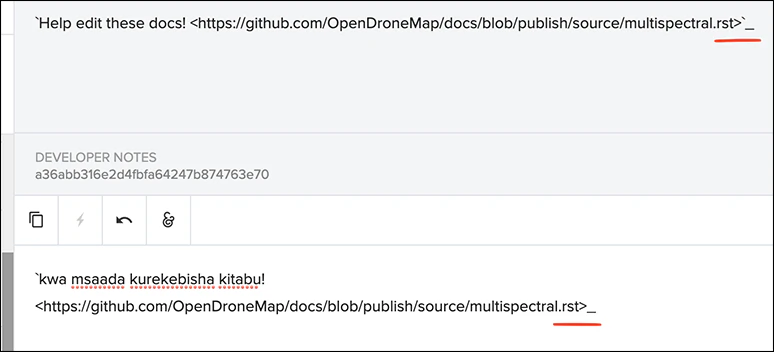
Link
Check out the `ODM documentation <https://docs.opendronemap.org/>`_!
Links need to have a space before, then a backtick or grave accent (`), then the text that will become the link on the page (in the above example: "ODM documentation"), then a space, then a less than symbol (<), then the complete URL, then a greater than symbol and underscore (>_).
![]()


Code
Code snippets need to have a space before, then a double backtick or grave accent (``) that touches the first character of the code text, then the code text, then a double backtick or grave accent (``) that touches the last character of the code text, then a space.
NOTE: Code snippets may be referring to specific software commands and so often should NOT be translated.
![]()


![]()


Managing the translation process
This project uses Transifex and the transifex-client tool to help people contribute translations. The transifex-client tool is included in the requirements.txt file and should be installed on your system during setup when you run pip install -r requirements.txt.
You need to configure your account. For this, you need to create an API Token for your user to access this service through the command line. This can be done under your Transifex User’s Settings. Set it up to use the token:
tx init --token $TOKEN --skipsetup
If there are new English .rst source files, you can map them by updating the ./.tx/config file.
After updating the individual argument files with make autogenerate, you can run
make updatepot
make updatelangpo
make pushlang
make pulllang
To add a new language, do it through the Transifex interface and then add a new line to the Makefile deploy command.
The Travis CI build failed... 😞
Don't panic! Unfortunately, Transifex doesn't protect the reST notation that Sphinx uses for things like formatting and links. It's possible that during translation, some of the syntax was broken.
Start up your Python virtual environment if it's not already with source venv/bin/activate and then run make allerr. This does the same thing as make deploy but removes the nit-picky mode so that it logs all errors and doesn't stop the build after hitting the first one.
You can also run the build for just one specific language, for example:
sphinx-build -b dirhtml -D language='sw' source "_build/html/sw/"
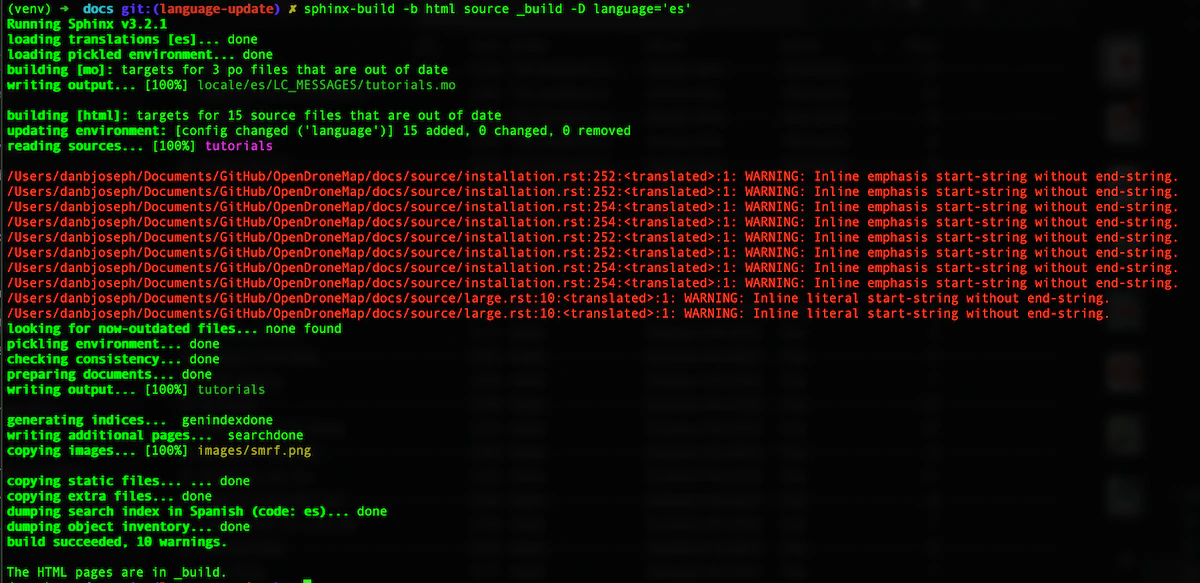
You should see output in your console such as:
Warning, treated as error:
/path/to/my/project/OpenDroneMap/docs/source/multispectral.rst:25:<translated>:1:Inline interpreted text or phrase reference start-string without end-string.
Look at the source file and line that is mentioned. In this case the file is source/multispectral.rst and the line is the number after the colon after the filename (25). Looking at the file we see that line 25 is the last line and the "Help edit these docs!" link.
Go to Transifex, go to the resource, and go to the string. The warning/error message should help you understand what went wrong. In this case the link syntax wasn't matched correctly. Fix and save the translation.
Pull the language down (for example, tx pull -l sw) and then try the build again.
Questions?
Reach out to https://community.opendronemap.org, we'll help you get up and running with your first contribution if you get stuck!
Repository Notes
Travis-CI docs for Building a Python Project and GitHub Pages Deployment. Personal access token with 'public_repo - Access public repositories' permissions created and used it in travis encrypt GH_TOKEN=my_github_token --add env.matrix as described in the Travis-CI docs.