kopia lustrzana https://github.com/villares/sketch-a-day
30 31
rodzic
4f5ac4d84e
commit
b75f443521
{kind=link}
Plik binarny nie jest wyświetlany.
|
Po Szerokość: | Wysokość: | Rozmiar: 26 KiB |
|
|
@ -0,0 +1,368 @@
|
|||
import py5
|
||||
import pymunk
|
||||
|
||||
CT_DEFAULT = 0
|
||||
CT_SPECIAL = 1
|
||||
CT_WALL = 2
|
||||
|
||||
MINIMUM_DIST = 50
|
||||
current_poly = [] # (x, y) tuples while mouse dragging
|
||||
wall_start = None
|
||||
drawing_dict = {}
|
||||
save_filename = 'data.pickle'
|
||||
mass_scale = 0.1
|
||||
|
||||
def setup():
|
||||
global space
|
||||
py5.size(600, 600)
|
||||
space = pymunk.Space()
|
||||
space.gravity = 0, 900
|
||||
space.add_collision_handler(
|
||||
CT_SPECIAL, CT_DEFAULT
|
||||
).pre_solve = color_collision
|
||||
add_wall(100, 500, 500, 500)
|
||||
add_static_box(300, 300, 100, 20)
|
||||
add_static_box(200, 200, 100, 20)
|
||||
add_static_box(400, 400, 100, 20)
|
||||
|
||||
|
||||
def draw(): # py5's main loop
|
||||
py5.background(200, 200, 150) # R, G, B
|
||||
for item, (draw_func, kwargs) in list(drawing_dict.items()):
|
||||
draw_func(item, **kwargs)
|
||||
py = item.body.position.y if hasattr(item, 'body') else item.position.y
|
||||
if py > py5.height + 50:
|
||||
space.remove(item)
|
||||
del drawing_dict[item]
|
||||
# many new balls
|
||||
if py5.is_key_pressed and py5.key_code == py5.SHIFT:
|
||||
add_ball(py5.mouse_x + py5.random(-1, 1),
|
||||
py5.mouse_y)
|
||||
# wall preview
|
||||
fill_and_stroke('red', 'red', 3)
|
||||
if wall_start:
|
||||
py5.line(*wall_start, py5.mouse_x, py5.mouse_y)
|
||||
if current_poly: # draws poly preview while dragging mouse
|
||||
with py5.begin_closed_shape():
|
||||
py5.vertices(current_poly)
|
||||
# advance the simulation
|
||||
space.step(1 / 60)
|
||||
|
||||
|
||||
def color_collision(arbiter, space, data):
|
||||
s1, s2 = arbiter.shapes
|
||||
s2.collision_type=CT_SPECIAL
|
||||
s1.collision_type=CT_DEFAULT
|
||||
drawing_dict[s2][1]['fill'] = int(py5.color(255, 0, 0))
|
||||
drawing_dict[s1][1]['fill'] = 0
|
||||
return True
|
||||
|
||||
def add_ball(
|
||||
x, y, diameter=10, stroke=None, fill=0, collision_type=CT_DEFAULT
|
||||
):
|
||||
radius = diameter / 2
|
||||
mass = py5.PI * radius ** 2 * mass_scale
|
||||
moment = pymunk.moment_for_circle(mass, 0, radius)
|
||||
body = pymunk.Body(mass, moment)
|
||||
body.position = x, y
|
||||
shp = pymunk.Circle(body, radius, (0, 0))
|
||||
shp.friction = 0.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_circle,
|
||||
{'stroke': stroke, 'fill': fill}
|
||||
)
|
||||
|
||||
def add_static_ball(
|
||||
x, y, diameter=10, stroke=None, fill=0, collision_type=CT_DEFAULT
|
||||
):
|
||||
radius = diameter / 2
|
||||
body = pymunk.Body(body_type=pymunk.Body.STATIC)
|
||||
shp = pymunk.Circle(body, radius, (x, y))
|
||||
shp.friction = 0.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_circle,
|
||||
{'s': None, 'f': f}
|
||||
)
|
||||
|
||||
def add_wall(xa, ya, xb, yb):
|
||||
shape = pymunk.Segment(space.static_body,
|
||||
(xa, ya), (xb, yb),
|
||||
radius=1.5)
|
||||
shape.collision_type = CT_WALL
|
||||
shape.friction = 100.99
|
||||
body = pymunk.Body(body_type=pymunk.Body.STATIC)
|
||||
space.add(body, shape)
|
||||
drawing_dict[shape] = (
|
||||
draw_static_segment,
|
||||
{'stroke': 128}
|
||||
)
|
||||
|
||||
def add_poly(poly, stroke=0, fill=255):
|
||||
triangles = triangulate(poly)
|
||||
# this is bad, I should use shapely!
|
||||
(xa, ya), (xb, yb) = min_max(poly)
|
||||
cx, cy = (xa + xb) / 2, (ya + yb) / 2
|
||||
polys = []
|
||||
total_mass = total_moi = 0
|
||||
for tri in triangles:
|
||||
tri_poly = [(x - cx, y - cy) for x, y in tri]
|
||||
mass = poly_area(tri_poly) * 0.1
|
||||
total_mass += mass
|
||||
moi = pymunk.moment_for_poly(mass, tri_poly)
|
||||
if not py5.np.isnan(moi):
|
||||
total_moi += moi
|
||||
polys.append(tri_poly)
|
||||
body = pymunk.Body(total_mass, total_moi)
|
||||
body.position = cx, cy
|
||||
shapes = []
|
||||
for tri_poly in polys:
|
||||
shp = pymunk.Poly(body, tri_poly)
|
||||
shp.friction = 0.2
|
||||
shapes.append(shp)
|
||||
drawing_dict[body] = (
|
||||
draw_poly,
|
||||
{'stroke': stroke, 'fill': fill,
|
||||
'poly': [(x - cx, y - cy) for x, y in poly]}
|
||||
)
|
||||
space.add(body, *shapes) # Note critical * operator expands .add(b, s0, s1, s2...)
|
||||
|
||||
|
||||
def add_static_ball(
|
||||
x, y, diameter=20, fill=0
|
||||
):
|
||||
radius = diameter / 2
|
||||
shp = pymunk.Circle(space.static_body, radius, (x, y))
|
||||
shp.friction = 0.99
|
||||
space.add(shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_circle,
|
||||
{'stroke': None, 'fill': f}
|
||||
)
|
||||
|
||||
def add_box(x, y, w, h, stroke=None, fill=0):
|
||||
mass = w * h * mass_scale
|
||||
moment = pymunk.moment_for_box(mass, (w, h))
|
||||
body = pymunk.Body(mass, moment)
|
||||
body.position = (x , y)
|
||||
shp = pymunk.Poly.create_box(body, (w, h))
|
||||
shp.friction = 100.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_poly,
|
||||
{'stroke': stroke, 'fill': fill}
|
||||
)
|
||||
|
||||
def add_static_box(x, y, w, h, stroke=None, fill=128):
|
||||
body = pymunk.Body(body_type=pymunk.Body.STATIC)
|
||||
body.position = (x , y)
|
||||
shp = pymunk.Poly.create_box(body, (w, h))
|
||||
shp.friction = 100.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_poly,
|
||||
{'stroke': stroke, 'fill': fill}
|
||||
)
|
||||
|
||||
def fill_and_stroke(fill=255, stroke=0, weight=None):
|
||||
py5.stroke_weight(weight or 1)
|
||||
if stroke is not None:
|
||||
py5.stroke(stroke)
|
||||
else:
|
||||
py5.no_stroke()
|
||||
if fill is not None:
|
||||
py5.fill(fill)
|
||||
else:
|
||||
py5.no_fill()
|
||||
|
||||
def draw_circle(shape, fill=0, stroke=None):
|
||||
fill_and_stroke(fill, stroke)
|
||||
py5.circle(shape.body.position.x,
|
||||
shape.body.position.y,
|
||||
shape.radius * 2)
|
||||
|
||||
def draw_static_segment(shape, fill=None, stroke=0, weight=3):
|
||||
fill_and_stroke(fill, stroke, weight)
|
||||
py5.line(shape.a.x, shape.a.y,
|
||||
shape.b.x, shape.b.y)
|
||||
|
||||
def draw_poly(item, fill=0, stroke=255, weight=None, poly=None):
|
||||
if isinstance(item, pymunk.Poly):
|
||||
fill_and_stroke(fill, stroke, weight)
|
||||
with py5.push_matrix():
|
||||
py5.translate(item.body.position.x, item.body.position.y)
|
||||
py5.rotate(item.body.angle)
|
||||
pts = item.get_vertices()
|
||||
with py5.begin_closed_shape():
|
||||
py5.vertices(pts)
|
||||
else:
|
||||
fill_and_stroke(fill, stroke, weight)
|
||||
with py5.push_matrix():
|
||||
py5.translate(item.position.x, item.position.y)
|
||||
py5.rotate(item.angle)
|
||||
print(poly)
|
||||
with py5.begin_closed_shape():
|
||||
py5.vertices(poly)
|
||||
|
||||
|
||||
|
||||
def mouse_clicked():
|
||||
if py5.is_key_pressed and py5.key_code == py5.CONTROL:
|
||||
f = py5.color(255, 255, 0)
|
||||
ct = CT_SPECIAL
|
||||
else:
|
||||
f = 0
|
||||
ct = CT_DEFAULT
|
||||
add_ball(py5.mouse_x + py5.random(-1, 1),
|
||||
py5.mouse_y,
|
||||
fill=f,
|
||||
collision_type=ct)
|
||||
|
||||
def mouse_dragged():
|
||||
global wall_start
|
||||
mx, my = py5.mouse_x, py5.mouse_y
|
||||
if py5.is_key_pressed and py5.key_code == py5.CONTROL:
|
||||
if (not current_poly or
|
||||
py5.dist(current_poly[-1][0],
|
||||
current_poly[-1][1],
|
||||
mx, my) >= MINIMUM_DIST):
|
||||
current_poly.append((mx, my))
|
||||
elif not wall_start:
|
||||
wall_start = (mx, my)
|
||||
|
||||
def min_max(pts):
|
||||
coords = tuple(zip(*pts))
|
||||
return tuple(map(min, coords)), tuple(map(max, coords))
|
||||
|
||||
def mouse_released():
|
||||
global wall_start
|
||||
if len(current_poly) >= 3:
|
||||
add_poly(current_poly)
|
||||
elif (wall_start and
|
||||
py5.dist(*wall_start,
|
||||
py5.mouse_x, py5.mouse_y) > 5):
|
||||
inicio_x, inicio_y = wall_start
|
||||
add_wall(inicio_x, inicio_y,
|
||||
py5.mouse_x, py5.mouse_y)
|
||||
wall_start = None
|
||||
current_poly.clear()
|
||||
|
||||
|
||||
def key_pressed():
|
||||
global wall_start, space, drawing_dict
|
||||
# tecla DELETE apaga walls
|
||||
if wall_start and py5.key in (py5.DELETE, py5.ESC):
|
||||
py5.intercept_escape()
|
||||
wall_start = None
|
||||
elif py5.key == py5.DELETE:
|
||||
for shape in reversed(drawing_dict.keys()):
|
||||
if isinstance(shape, pymunk.Segment):
|
||||
space.remove(shape)
|
||||
del drawing_dict[shape]
|
||||
break
|
||||
# "c" limpa balls
|
||||
elif py5.key in ('c', 'C'):
|
||||
for shape in space.shapes:
|
||||
if isinstance(shape, pymunk.Circle):
|
||||
space.remove(shape)
|
||||
del drawing_dict[shape]
|
||||
# "s" salve simulation state
|
||||
elif py5.key == 's':
|
||||
py5.save_pickle((space, drawing_dict), 'data.pickle')
|
||||
print(f'Saved {save_filename}.')
|
||||
# "l" load from previous saved state
|
||||
elif py5.key == 'l':
|
||||
if py5.Path(save_filename).is_file():
|
||||
space, drawing_dict = py5.load_pickle(save_filename)
|
||||
print(f'Loaded {save_filename}.')
|
||||
|
||||
print(f'shapes in simulation: {len(space.shapes)}')
|
||||
|
||||
def mouse_wheel(e):
|
||||
for obj in space.shapes:
|
||||
info = obj.point_query((py5.mouse_x, py5.mouse_y))
|
||||
if info.distance < 2:
|
||||
obj.body.angle += py5.radians(e.get_count())
|
||||
|
||||
|
||||
def triangulate(original_shape):
|
||||
"""
|
||||
Based on https://gist.github.com/Shaptic/6297978
|
||||
"""
|
||||
# Use orientation of the top-left-most vertex.
|
||||
shape = list(original_shape[:])
|
||||
left, starting_index = shape[0], 0
|
||||
for i, v in enumerate(shape):
|
||||
if v[0] < left[0] or (v[0] == left[0] and v[1] < left[1]):
|
||||
left = v
|
||||
starting_index = i
|
||||
orientation = ccw(get_ear(shape, starting_index))
|
||||
triangles = []
|
||||
while len(shape) >= 3:
|
||||
reflex_vertices = []
|
||||
eartip = -1
|
||||
for i, v in enumerate(shape): # For each vertex in the shape
|
||||
if eartip >= 0:
|
||||
break
|
||||
triangle = get_ear(shape, i) # A triangle from vertex to adjacents.
|
||||
# If polygon's orientation doesn't match that of the triangle,
|
||||
# it's definitely a reflex and not an ear.
|
||||
if ccw(triangle) != orientation:
|
||||
reflex_vertices.append(v)
|
||||
continue # Test reflex vertices first.
|
||||
for rv in reflex_vertices:
|
||||
if rv in triangle:
|
||||
continue # If we are testing ourselves, skip.
|
||||
elif in_poly(rv, triangle):
|
||||
break # If any reflex vertex in triangle, not ear.
|
||||
else: # No reflexes, so we test all past current vertex.
|
||||
for past_current_v in shape[i + 2:]:
|
||||
if past_current_v in triangle:
|
||||
continue
|
||||
elif in_poly(past_current_v, triangle):
|
||||
break # No vertices in the triangle, we are an ear.
|
||||
else:
|
||||
eartip = i
|
||||
if eartip == -1:
|
||||
break
|
||||
triangles.append(get_ear(shape, eartip))
|
||||
del shape[eartip]
|
||||
return triangles
|
||||
|
||||
def ccw(tri):
|
||||
assert len(tri) == 3, 'must be a triangle'
|
||||
a, b, c = tri
|
||||
return (b[0] - a[0]) * (c[1] - a[1]) > (b[1] - a[1]) * (c[0] - a[0])
|
||||
|
||||
def in_poly(p, points):
|
||||
# ray-casting algorithm based on
|
||||
# https://wrf.ecse.rpi.edu/Research/Short_Notes/pnpoly.html
|
||||
inside = False
|
||||
if len(points[0]) == 3:
|
||||
for i, (xi, yi, _) in enumerate(points):
|
||||
xj, yj, _= points[i - 1]
|
||||
if ((yi > p[1]) != (yj > p[1])) and (p[0] < (xj - xi) * (p[1] - yi)
|
||||
/ (yj - yi) + xi):
|
||||
inside = not inside # an intersection was found
|
||||
return inside
|
||||
else:
|
||||
for i, (xi, yi) in enumerate(points):
|
||||
xj, yj = points[i - 1]
|
||||
if ((yi > p[1]) != (yj > p[1])) and (p[0] < (xj - xi) * (p[1] - yi)
|
||||
/ (yj - yi) + xi):
|
||||
inside = not inside # an intersection was found
|
||||
return inside
|
||||
|
||||
def get_ear(shape, ear):
|
||||
return (shape[ear - 1], shape[ear], shape[(ear+1) % len(shape)])
|
||||
|
||||
|
||||
def poly_area(pts):
|
||||
area = 0.0
|
||||
for (ax, ay), (bx, by) in zip(pts, pts[1:] + [pts[0]]):
|
||||
area += ax * by
|
||||
area -= bx * ay
|
||||
return abs(area) / 2.0
|
||||
|
||||
py5.run_sketch(block=False)
|
||||
{kind=link}
Plik binarny nie jest wyświetlany.
|
Po Szerokość: | Wysokość: | Rozmiar: 44 KiB |
|
|
@ -0,0 +1,373 @@
|
|||
import py5
|
||||
import pymunk
|
||||
|
||||
CT_DEFAULT = 0
|
||||
CT_SPECIAL = 1
|
||||
CT_WALL = 2
|
||||
|
||||
MINIMUM_DIST = 50
|
||||
current_poly = [] # (x, y) tuples while mouse dragging
|
||||
wall_start = None
|
||||
drawing_dict = {}
|
||||
save_filename = 'data.pickle'
|
||||
mass_scale = 0.1
|
||||
|
||||
def setup():
|
||||
global space
|
||||
py5.size(600, 600)
|
||||
space = pymunk.Space()
|
||||
space.gravity = 0, 900
|
||||
space.add_collision_handler(
|
||||
CT_SPECIAL, CT_DEFAULT
|
||||
).pre_solve = color_collision
|
||||
add_wall(100, 500, 500, 500)
|
||||
add_box(300, 300, 100, 20, kinematic=True, fill=128)
|
||||
add_box(200, 200, 100, 20, kinematic=True, fill=128)
|
||||
add_box(400, 400, 100, 20, kinematic=True, fill=128)
|
||||
|
||||
|
||||
def draw(): # py5's main loop
|
||||
py5.background(200, 200, 150) # R, G, B
|
||||
for item, (draw_func, kwargs) in list(drawing_dict.items()):
|
||||
draw_func(item, **kwargs)
|
||||
py = item.body.position.y if hasattr(item, 'body') else item.position.y
|
||||
if py > py5.height + 50:
|
||||
space.remove(item)
|
||||
del drawing_dict[item]
|
||||
# many new balls
|
||||
if py5.is_key_pressed and py5.key_code == py5.SHIFT:
|
||||
add_ball(py5.mouse_x + py5.random(-1, 1),
|
||||
py5.mouse_y)
|
||||
# wall preview
|
||||
fill_and_stroke('red', 'red', 3)
|
||||
if wall_start:
|
||||
py5.line(*wall_start, py5.mouse_x, py5.mouse_y)
|
||||
if current_poly: # draws poly preview while dragging mouse
|
||||
with py5.begin_closed_shape():
|
||||
py5.vertices(current_poly)
|
||||
# advance the simulation
|
||||
space.step(1 / 60)
|
||||
|
||||
|
||||
def color_collision(arbiter, space, data):
|
||||
s1, s2 = arbiter.shapes
|
||||
s2.collision_type=CT_SPECIAL
|
||||
s1.collision_type=CT_DEFAULT
|
||||
drawing_dict[s2][1]['fill'] = int(py5.color(255, 0, 0))
|
||||
drawing_dict[s1][1]['fill'] = 0
|
||||
return True
|
||||
|
||||
def add_ball(
|
||||
x, y, diameter=10, stroke=None, fill=0, collision_type=CT_DEFAULT
|
||||
):
|
||||
radius = diameter / 2
|
||||
mass = py5.PI * radius ** 2 * mass_scale
|
||||
moment = pymunk.moment_for_circle(mass, 0, radius)
|
||||
body = pymunk.Body(mass, moment)
|
||||
body.position = x, y
|
||||
shp = pymunk.Circle(body, radius, (0, 0))
|
||||
shp.friction = 0.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_circle,
|
||||
{'stroke': stroke, 'fill': fill}
|
||||
)
|
||||
|
||||
def add_static_ball(
|
||||
x, y, diameter=10, stroke=None, fill=0, collision_type=CT_DEFAULT
|
||||
):
|
||||
radius = diameter / 2
|
||||
body = pymunk.Body(body_type=pymunk.Body.STATIC)
|
||||
shp = pymunk.Circle(body, radius, (x, y))
|
||||
shp.friction = 0.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_circle,
|
||||
{'s': None, 'f': f}
|
||||
)
|
||||
|
||||
def add_wall(xa, ya, xb, yb):
|
||||
shape = pymunk.Segment(space.static_body,
|
||||
(xa, ya), (xb, yb),
|
||||
radius=1.5)
|
||||
shape.collision_type = CT_WALL
|
||||
shape.friction = 100.99
|
||||
body = pymunk.Body(body_type=pymunk.Body.STATIC)
|
||||
space.add(body, shape)
|
||||
drawing_dict[shape] = (
|
||||
draw_segment,
|
||||
{'stroke': 128}
|
||||
)
|
||||
|
||||
def add_poly(poly, stroke=0, fill=255):
|
||||
triangles = triangulate(poly)
|
||||
# this is bad, I should use shapely!
|
||||
(xa, ya), (xb, yb) = min_max(poly)
|
||||
cx, cy = (xa + xb) / 2, (ya + yb) / 2
|
||||
polys = []
|
||||
total_mass = total_moi = 0
|
||||
for tri in triangles:
|
||||
tri_poly = [(x - cx, y - cy) for x, y in tri]
|
||||
mass = poly_area(tri_poly) * 0.1
|
||||
total_mass += mass
|
||||
moi = pymunk.moment_for_poly(mass, tri_poly)
|
||||
if not py5.np.isnan(moi):
|
||||
total_moi += moi
|
||||
polys.append(tri_poly)
|
||||
body = pymunk.Body(total_mass, total_moi)
|
||||
body.position = cx, cy
|
||||
shapes = []
|
||||
for tri_poly in polys:
|
||||
shp = pymunk.Poly(body, tri_poly)
|
||||
shp.friction = 0.2
|
||||
shapes.append(shp)
|
||||
drawing_dict[body] = (
|
||||
draw_poly,
|
||||
{'stroke': stroke, 'fill': fill,
|
||||
'poly': [(x - cx, y - cy) for x, y in poly]}
|
||||
)
|
||||
space.add(body, *shapes) # Note critical * operator expands .add(b, s0, s1, s2...)
|
||||
|
||||
|
||||
def add_static_ball(
|
||||
x, y, diameter=20, fill=0
|
||||
):
|
||||
radius = diameter / 2
|
||||
shp = pymunk.Circle(space.static_body, radius, (x, y))
|
||||
shp.friction = 0.99
|
||||
space.add(shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_circle,
|
||||
{'stroke': None, 'fill': f}
|
||||
)
|
||||
|
||||
def add_box(x, y, w, h, stroke=None, fill=0, kinematic=False):
|
||||
if kinematic:
|
||||
body = pymunk.Body(body_type=pymunk.Body.KINEMATIC)
|
||||
else:
|
||||
mass = w * h * mass_scale
|
||||
moment = pymunk.moment_for_box(mass, (w, h))
|
||||
body = pymunk.Body(mass, moment)
|
||||
body.position = (x , y)
|
||||
shp = pymunk.Poly.create_box(body, (w, h))
|
||||
shp.friction = 100.99
|
||||
space.add(body, shp)
|
||||
drawing_dict[shp] = (
|
||||
draw_poly,
|
||||
{'stroke': stroke, 'fill': fill}
|
||||
)
|
||||
|
||||
def fill_and_stroke(fill=255, stroke=0, weight=None):
|
||||
py5.stroke_weight(weight or 1)
|
||||
if stroke is not None:
|
||||
py5.stroke(stroke)
|
||||
else:
|
||||
py5.no_stroke()
|
||||
if fill is not None:
|
||||
py5.fill(fill)
|
||||
else:
|
||||
py5.no_fill()
|
||||
|
||||
def draw_circle(shape, fill=0, stroke=None):
|
||||
fill_and_stroke(fill, stroke)
|
||||
py5.circle(shape.body.position.x,
|
||||
shape.body.position.y,
|
||||
shape.radius * 2)
|
||||
|
||||
def draw_segment(item, fill=None, stroke=0, weight=3):
|
||||
fill_and_stroke(fill, stroke, weight)
|
||||
with py5.push_matrix():
|
||||
py5.translate(item.body.position.x, item.body.position.y)
|
||||
py5.rotate(item.body.angle)
|
||||
py5.line(item.a.x, item.a.y,
|
||||
item.b.x, item.b.y)
|
||||
|
||||
def draw_poly(item, fill=0, stroke=255, weight=None, poly=None):
|
||||
if isinstance(item, pymunk.Poly):
|
||||
fill_and_stroke(fill, stroke, weight)
|
||||
with py5.push_matrix():
|
||||
py5.translate(item.body.position.x, item.body.position.y)
|
||||
py5.rotate(item.body.angle)
|
||||
pts = item.get_vertices()
|
||||
with py5.begin_closed_shape():
|
||||
py5.vertices(pts)
|
||||
else:
|
||||
fill_and_stroke(fill, stroke, weight)
|
||||
with py5.push_matrix():
|
||||
py5.translate(item.position.x, item.position.y)
|
||||
py5.rotate(item.angle)
|
||||
print(poly)
|
||||
with py5.begin_closed_shape():
|
||||
py5.vertices(poly)
|
||||
|
||||
|
||||
|
||||
def mouse_clicked():
|
||||
if py5.is_key_pressed and py5.key_code == py5.CONTROL:
|
||||
f = py5.color(255, 255, 0)
|
||||
ct = CT_SPECIAL
|
||||
else:
|
||||
f = 0
|
||||
ct = CT_DEFAULT
|
||||
add_ball(py5.mouse_x + py5.random(-1, 1),
|
||||
py5.mouse_y,
|
||||
fill=f,
|
||||
collision_type=ct)
|
||||
|
||||
def mouse_dragged():
|
||||
global wall_start
|
||||
mx, my = py5.mouse_x, py5.mouse_y
|
||||
if py5.is_key_pressed and py5.key_code == py5.CONTROL:
|
||||
if (not current_poly or
|
||||
py5.dist(current_poly[-1][0],
|
||||
current_poly[-1][1],
|
||||
mx, my) >= MINIMUM_DIST):
|
||||
current_poly.append((mx, my))
|
||||
elif (not wall_start and
|
||||
py5.is_key_pressed and
|
||||
py5.key_code == py5.SHIFT):
|
||||
wall_start = (mx, my)
|
||||
else:
|
||||
for shp in space.shapes:
|
||||
info = shp.point_query((py5.mouse_x, py5.mouse_y))
|
||||
if info.distance < 2:
|
||||
v = pymunk.Vec2d(py5.mouse_x - py5.pmouse_x,
|
||||
py5.mouse_y - py5.pmouse_y)
|
||||
shp.body.position += v
|
||||
|
||||
def mouse_wheel(e):
|
||||
for obj in space.shapes:
|
||||
info = obj.point_query((py5.mouse_x, py5.mouse_y))
|
||||
if info.distance < 2:
|
||||
obj.body.angle += py5.radians(e.get_count())
|
||||
|
||||
|
||||
def min_max(pts):
|
||||
coords = tuple(zip(*pts))
|
||||
return tuple(map(min, coords)), tuple(map(max, coords))
|
||||
|
||||
def mouse_released():
|
||||
global wall_start
|
||||
if len(current_poly) >= 3:
|
||||
add_poly(current_poly)
|
||||
elif (wall_start and
|
||||
py5.dist(*wall_start,
|
||||
py5.mouse_x, py5.mouse_y) > 5):
|
||||
inicio_x, inicio_y = wall_start
|
||||
add_wall(inicio_x, inicio_y,
|
||||
py5.mouse_x, py5.mouse_y)
|
||||
wall_start = None
|
||||
current_poly.clear()
|
||||
|
||||
|
||||
def key_pressed():
|
||||
global wall_start, space, drawing_dict
|
||||
# tecla DELETE apaga walls
|
||||
if wall_start and py5.key in (py5.DELETE, py5.ESC):
|
||||
py5.intercept_escape()
|
||||
wall_start = None
|
||||
elif py5.key == py5.DELETE:
|
||||
for shape in reversed(drawing_dict.keys()):
|
||||
if isinstance(shape, pymunk.Segment):
|
||||
space.remove(shape)
|
||||
del drawing_dict[shape]
|
||||
break
|
||||
# "c" limpa balls
|
||||
elif py5.key in ('c', 'C'):
|
||||
for shape in space.shapes:
|
||||
if isinstance(shape, pymunk.Circle):
|
||||
space.remove(shape)
|
||||
del drawing_dict[shape]
|
||||
# "s" salve simulation state
|
||||
elif py5.key == 's':
|
||||
py5.save_pickle((space, drawing_dict), 'data.pickle')
|
||||
print(f'Saved {save_filename}.')
|
||||
# "l" load from previous saved state
|
||||
elif py5.key == 'l':
|
||||
if py5.Path(save_filename).is_file():
|
||||
space, drawing_dict = py5.load_pickle(save_filename)
|
||||
print(f'Loaded {save_filename}.')
|
||||
|
||||
print(f'shapes in simulation: {len(space.shapes)}')
|
||||
|
||||
|
||||
def triangulate(original_shape):
|
||||
"""
|
||||
Based on https://gist.github.com/Shaptic/6297978
|
||||
"""
|
||||
# Use orientation of the top-left-most vertex.
|
||||
shape = list(original_shape[:])
|
||||
left, starting_index = shape[0], 0
|
||||
for i, v in enumerate(shape):
|
||||
if v[0] < left[0] or (v[0] == left[0] and v[1] < left[1]):
|
||||
left = v
|
||||
starting_index = i
|
||||
orientation = ccw(get_ear(shape, starting_index))
|
||||
triangles = []
|
||||
while len(shape) >= 3:
|
||||
reflex_vertices = []
|
||||
eartip = -1
|
||||
for i, v in enumerate(shape): # For each vertex in the shape
|
||||
if eartip >= 0:
|
||||
break
|
||||
triangle = get_ear(shape, i) # A triangle from vertex to adjacents.
|
||||
# If polygon's orientation doesn't match that of the triangle,
|
||||
# it's definitely a reflex and not an ear.
|
||||
if ccw(triangle) != orientation:
|
||||
reflex_vertices.append(v)
|
||||
continue # Test reflex vertices first.
|
||||
for rv in reflex_vertices:
|
||||
if rv in triangle:
|
||||
continue # If we are testing ourselves, skip.
|
||||
elif in_poly(rv, triangle):
|
||||
break # If any reflex vertex in triangle, not ear.
|
||||
else: # No reflexes, so we test all past current vertex.
|
||||
for past_current_v in shape[i + 2:]:
|
||||
if past_current_v in triangle:
|
||||
continue
|
||||
elif in_poly(past_current_v, triangle):
|
||||
break # No vertices in the triangle, we are an ear.
|
||||
else:
|
||||
eartip = i
|
||||
if eartip == -1:
|
||||
break
|
||||
triangles.append(get_ear(shape, eartip))
|
||||
del shape[eartip]
|
||||
return triangles
|
||||
|
||||
def ccw(tri):
|
||||
assert len(tri) == 3, 'must be a triangle'
|
||||
a, b, c = tri
|
||||
return (b[0] - a[0]) * (c[1] - a[1]) > (b[1] - a[1]) * (c[0] - a[0])
|
||||
|
||||
def in_poly(p, points):
|
||||
# ray-casting algorithm based on
|
||||
# https://wrf.ecse.rpi.edu/Research/Short_Notes/pnpoly.html
|
||||
inside = False
|
||||
if len(points[0]) == 3:
|
||||
for i, (xi, yi, _) in enumerate(points):
|
||||
xj, yj, _= points[i - 1]
|
||||
if ((yi > p[1]) != (yj > p[1])) and (p[0] < (xj - xi) * (p[1] - yi)
|
||||
/ (yj - yi) + xi):
|
||||
inside = not inside # an intersection was found
|
||||
return inside
|
||||
else:
|
||||
for i, (xi, yi) in enumerate(points):
|
||||
xj, yj = points[i - 1]
|
||||
if ((yi > p[1]) != (yj > p[1])) and (p[0] < (xj - xi) * (p[1] - yi)
|
||||
/ (yj - yi) + xi):
|
||||
inside = not inside # an intersection was found
|
||||
return inside
|
||||
|
||||
def get_ear(shape, ear):
|
||||
return (shape[ear - 1], shape[ear], shape[(ear+1) % len(shape)])
|
||||
|
||||
|
||||
def poly_area(pts):
|
||||
area = 0.0
|
||||
for (ax, ay), (bx, by) in zip(pts, pts[1:] + [pts[0]]):
|
||||
area += ax * by
|
||||
area -= bx * ay
|
||||
return abs(area) / 2.0
|
||||
|
||||
py5.run_sketch(block=False)
|
||||
|
|
@ -21,6 +21,27 @@ If you appreciate what I have been doing, you may also support my artistic work,
|
|||
2025 \| [<b>2024</b>](2024.md) \| [<b>2023</b>](2023.md) \| [<b>2022</b>](2022.md) \| [<b>2021</b>](2021.md) \| [<b>2020</b>](2020.md) \| [<b>2019</b>](2019.md) \| [<b>2018</b>](2018.md)
|
||||
|
||||
|
||||
---
|
||||
|
||||
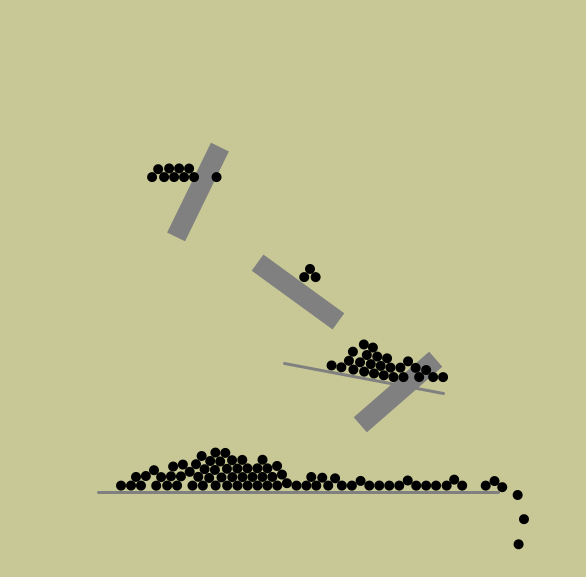
### sketch_2025_05_01
|
||||
|
||||
|
||||
|
||||
[sketch_2025_05_01](https://github.com/villares/sketch-a-day/tree/main/2025/sketch_2025_05_01) [[py5](https://py5coding.org/)]
|
||||
|
||||
I needed to make the bodies KINEMATIC... It was a long time since I tried this I had forgoten all about the these.
|
||||
|
||||
---
|
||||
|
||||
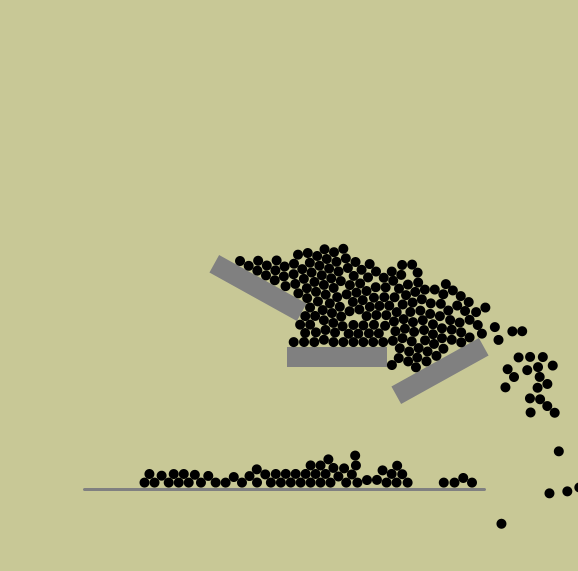
### sketch_2025_04_30
|
||||
|
||||
|
||||
|
||||
[sketch_2025_04_30](https://github.com/villares/sketch-a-day/tree/main/2025/sketch_2025_04_30) [[py5](https://py5coding.org/)]
|
||||
|
||||
Broken! Maybe something in pymunk changed, I have to investigate!
|
||||
(I rotated the box bodies, the shapes are drawn rotated, but the geometry for the collisions seems not to be rotated...)
|
||||
|
||||
---
|
||||
|
||||
### sketch_2025_04_29
|
||||
|
|
|
|||
Ładowanie…
Reference in New Issue