kopia lustrzana https://github.com/sh123/esp32_loraprs
7.4 KiB
7.4 KiB
LoRa APRS ESP32 KISS APRSDroid bluetooth modem, LoRa APRS-IS RX/TX iGate with digipeater
Amateur radio ESP32 based LoRa APRSDroid KISS Bluetooth modem + LoRa APRS-IS RX/TX iGate server over WiFI + digipeater
Can be used in two modes:
- LoRa APRS KISS client over bluetooth
- you need to use APRSDroid application (https://aprsdroid.org), connect to the modem using bluetooth, data will be re-transmitted through the LoRa radio, this is similar to APRSDroid micromodem - https://unsigned.io/micromodem/, received data will be sent back to the APRSDroid using bluetooth. By having two clients you can not only send your position, but also send and receive APRS messages
- it is also possible to use other KISS APRS clients over Bluetooth serial, just use
rfcommon Linux to setup serial over Bluetooth and put up AX25 interface withkissattach, then use any existing Linux APRS clients, such asXastiror even runTCPIPover AX25
- LoRa APRS iGate RX/TX server + Digipeater
- RF to APRS-IS gating, it will connect to WiFI and will forward received APRS positions from RF LoRa into the APRS-IS network, it also reports client signal level, by appending it into the APRS comment, so you can see your signal reports in different locations (could be enabled or disabled from config)
- APRS-IS to RF gating, it is possible to enable it together with the filter in the config, so APRS-IS data will be forwarded to RF
- RF digirepating for basic
WIDEn-npaths,TRACEand others are not supported yet - beaconing, own station periodic beacon announcement to APRS-IS and RF
Compatible Boards
All work was done on ESP32-WROOM with custom made LoRa shield, if your ESP32 board is compatible then it should work, but there might be need to redefine pinouts to LoRa module if it differs (see further description in Software Setup section)
Software Dependencies (install via libraries)
- Arduino ESP32 library: https://github.com/espressif/arduino-esp32
- LoRa arduino library: https://github.com/sandeepmistry/arduino-LoRa
- Arduino Timer library: https://github.com/contrem/arduino-timer
Software Setup
- when setting up APRSDroid, use "TNC (KISS)" connection protocol in Connection Preferences -> Connection Protocol
- go to esp32_loraprs.ino and make next changes based on your requirements in
initializeConfig()- set
cfg.IsClientModetofalseif you are planning to run server mode for APRS-IS iGate / Digipeater - for server mode fill
cfg.WifiSsidandcfg.WifiKeywith your WiFI AP data - for server mode fill
cfg.AprsLoginandcfg.AprsPasswith APRS-IS login callsign and pass - for server mode fill
cfg.AprsFilter, see http://www.aprs-is.net/javAPRSFilter.aspx for various formats, do not includefilterdirective, just space separated values - change
cfg.LoraFreqif you are planning to use different frequency or if planning to calibrate clients, currently it is set to 433.775MHz as per https://vienna.iaru-r1.org/wp-content/uploads/2019/01/VIE19-C5-015-OEVSV-LORA-APRS-433-MHz.pdf
- set
- if you are planning to use different esp32 pinouts then modify loraprs.h
- lora module SS, CfgPinSs, pin 5
- lora module RST, CfgPinRst, pin 26
- lora module DIO0, CfgPinDio0, pin 14
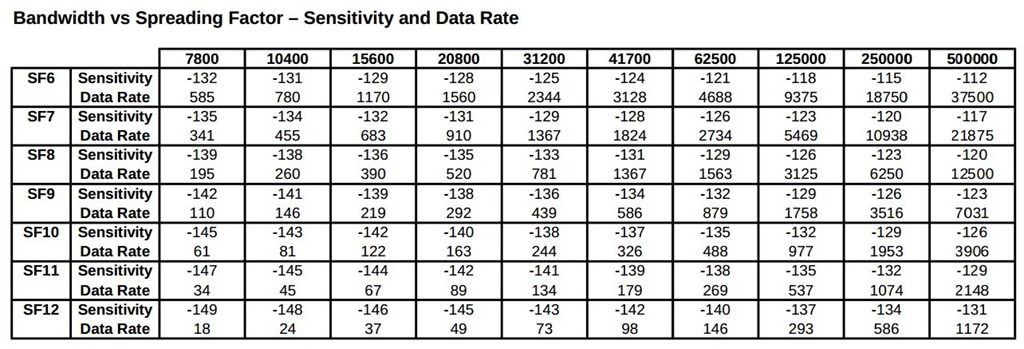
- if you are planning to experiment with different bandwidths/spread factors then modify values in
initializeConfig(), with current parameters APRS packet time on air is around 2 seconds to decode with as lower level as possible, use https://github.com/tanupoo/lorawan_toa to make calculations- lora bandwidth
cfg.LoraBw, 125 kHz (also tested with 20.6 KHz and SF9 with frequency correction) - lora spread factor
cfg.LoraSf, 12 (should decode down to -20dB, choosen with the goal for minimum signal decode) - lora coding rate
cfg.LoraCodingRate, 7 - lora output power
cfg.LoraPower, 20 (max 20 dBm ~ 100mW, change to lower value if needed) - sync word
cfg.LoraSync, 0xf3
- lora bandwidth
- consider minimum decode level based on on BW + SF
- use 80 MHz ESP32 frequency in Arduino SDK, it will prolong battery life when operating portable, higher CPU speed is not required, there are no CPU intensive operations
- uses LoRa built-in checksum calculation to drop broken packets
- note, that there a is significant frequency drift on temperature changes for different modules
- you need to use external TCXO if you are planning to use modules for narrow bandwidths less than 125 kHz
- or calibrate clients based on server frequency drift report by changing
cfg.LoraFreq, for example, let client and server run for an 30-60 minutes and if server reports err: -1500, then set client frequency to about 1000 kHz less, e.g. instead of 433.775 set it to 433.774, this will give couple of additional dB - alternatively automatic calibration could be done on server or client side by enabling automatic frequency correction by setting
cfg.EnableAutoFreqCorrectiontotrue, might be suitable for experiments where only one client is operating or if server broadcast messages, so clients can correct their frequency
- other useful options are
cfg.EnableSignalReportset totrueto enable signal report, it will be added as a comment to APRS-IS submitted locationcfg.EnablePersistentAprsConnectionset tofalseto avoid keeping connection open to APRS-IScfg.EnableRfToIsset totrueto forward RF traffic to APRS-IScfg.EnableIsToRfset totrueto forward APRS-IS traffic to RF, see alsocfg.AprsFilterfor traffic filteringcfg.EnableRepeaterset totrueto enable packet repeatercfg.EnableBeaconset totrueto enable periodic beacons specified incfg.AprsRawBeaconwith period specified incfg.AprsRawBeaconPeriodMinutesinto RF and APRS-IS ifcfg.EnableRfToIsis enabled
Test Results

- Antennas
- Client: rubber duck, halo, mobile antenna on a car roof
- Server: 7 element UHF yagi indoors, vertical on the roof
- Range (20 KHz channel width and 9 spreading factor, also got similar results with 125 kHz and 12 SF)
- About 7 km when server is 30m above the ground and client is 2m above the ground with rubber duck antenna or inside a car
- About 13 km when server is 30m above the ground and client is at some higher point ~40m above the ground with rubber duck antenna
- About 17km maximum (non-reliable) between base and mobile station with antenna on the car roof
- About 20km over the sea between base and handheld
- Signal levels
- Successful decodes down to -19.75dB below the noise floor when using compressed APRS coordinates (smaller packets, about 50 bytes, 32 bytes without PATH, speed, altitude), see APRSDroid discussions on compressed corrdinates support and custom branches
- Polarization
- Using horizontal polarization improves successful decoding probability and receiving range
- Interference
- Monitor your planned frequency, such as 433.775 MHz for ISM device activity, if there is strong interference from other users tune up or down it to minimize interference
- Weather
- Rain and high humidity levels decrease signal level by about ~3-6 dB