kopia lustrzana https://github.com/OpenDroneMap/ODM
Modernized README
rodzic
8e8baa5238
commit
a0877708dc
248
README.md
248
README.md
|
|
@ -1,245 +1,125 @@
|
|||

|
||||

|
||||
|
||||
For documentation, see https://docs.opendronemap.org and Quickstart below
|
||||
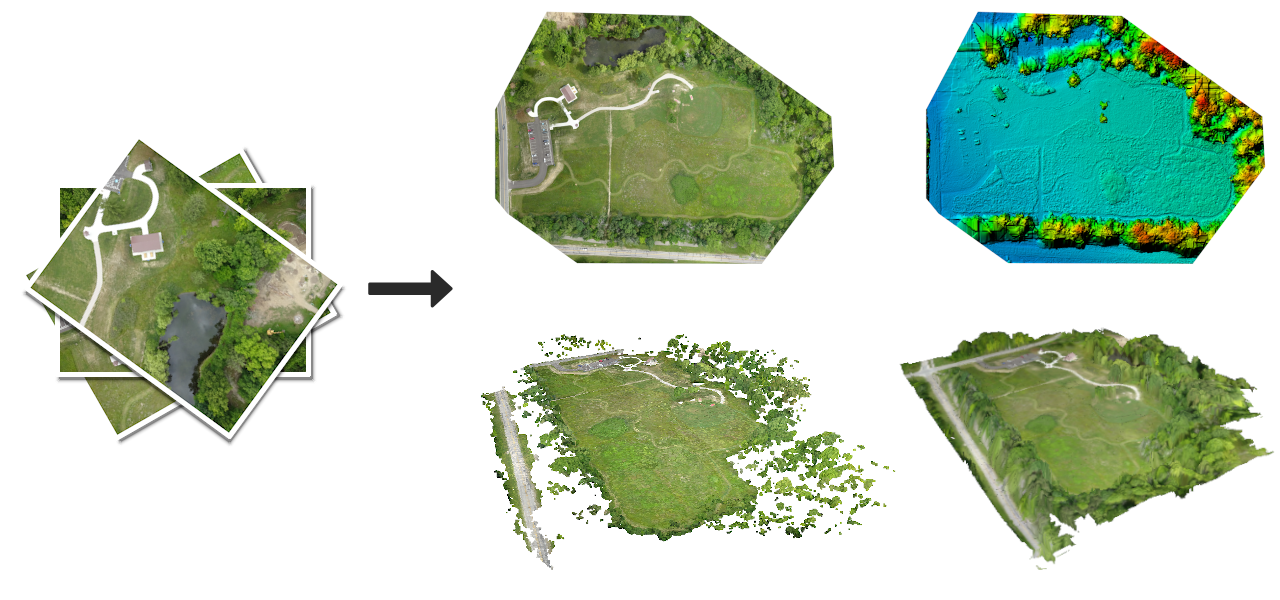
An open source command line toolkit for processing aerial drone imagery. ODM turns simple 2D images into:
|
||||
|
||||
## What is it?
|
||||
* Classified Point Clouds
|
||||
* 3D Textured Models
|
||||
* Georeferenced Orthorectified Imagery
|
||||
* Georeferenced Digital Elevation Models
|
||||
|
||||
ODM is an open source command line toolkit for processing aerial drone imagery. Typical drones use simple point-and-shoot cameras, so the images from drones, while from a different perspective, are similar to any pictures taken from point-and-shoot cameras, i.e. non-metric imagery. OpenDroneMap turns those simple images into three dimensional geographic data that can be used in combination with other geographic datasets.
|
||||
|
||||
|
||||
If you want a graphical user interface for it, check out [WebODM](https://github.com/OpenDroneMap/WebODM)
|
||||
|
||||

|
||||
|
||||
In a word, ODM is a toolchain for processing raw civilian UAS imagery to other useful products. What kind of products?
|
||||
|
||||
1. Point Clouds
|
||||
2. Digital Surface Models
|
||||
3. Textured Digital Surface Models
|
||||
4. Orthorectified Imagery
|
||||
5. Classified Point Clouds (coming soon)
|
||||
6. Digital Elevation Models
|
||||
7. etc.
|
||||
|
||||
ODM now includes state-of-the-art 3D reconstruction work by Michael Waechter, Nils Moehrle, and Michael Goesele. See their publication at [http://www.gcc.tu-darmstadt.de/media/gcc/papers/Waechter-2014-LTB.pdf](http://www.gcc.tu-darmstadt.de/media/gcc/papers/Waechter-2014-LTB.pdf).
|
||||
The application is available for Windows, Mac and Linux and it works from the command line, making it ideal for power users, scripts and for integration with other software.
|
||||
|
||||
If you would rather not type commands in a shell and are looking for a friendly user interface, check out [WebODM](https://github.com/OpenDroneMap/WebODM).
|
||||
|
||||
## Quickstart
|
||||
|
||||
### Docker (All platforms)
|
||||
The easiest way to run ODM is via docker. To install docker, see [docs.docker.com](https://docs.docker.com). Once you have docker installed and [working](https://docs.docker.com/get-started/#test-docker-installation), you can run ODM by placing some images (JPEGs or TIFFs) in a folder named “images” (for example `/datasets/project/images` or `C:\Users\youruser\datasets\project\images`) and simply run from a Terminal / Command Prompt:
|
||||
|
||||
The easiest way to run ODM is through Docker. If you don't have it installed,
|
||||
see the [Docker Ubuntu installation tutorial](https://docs.docker.com/engine/installation/linux/ubuntulinux/) and follow the
|
||||
instructions through "Create a Docker group". The Docker image workflow
|
||||
has equivalent procedures for Mac OS X and Windows found at [docs.docker.com](https://docs.docker.com). Then run the following command which will build a pre-built image and run on images found in `$(pwd)/images` (you can change this if you need to, see the [wiki](https://github.com/OpenDroneMap/OpenDroneMap/wiki/Docker) for more detailed instructions.
|
||||
```bash
|
||||
# Windows
|
||||
docker run -ti --rm -v c:/Users/youruser/datasets:/datasets opendronemap/odm --project-path /datasets project
|
||||
|
||||
```
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
-v "$(pwd)/odm_texturing:/code/odm_texturing" \
|
||||
opendronemap/odm
|
||||
# Mac/Linux
|
||||
docker run -ti --rm -v /datasets:/datasets opendronemap/odm --project-path /datasets project
|
||||
```
|
||||
|
||||
### Native Install (Ubuntu 16.04)
|
||||
You can pass [additional parameters](https://docs.opendronemap.org/arguments.html) by appending them to the command:
|
||||
|
||||
** Please note that we need help getting ODM updated to work for 16.10+. Look at [#659](https://github.com/OpenDroneMap/OpenDroneMap/issues/659).
|
||||
```bash
|
||||
docker run -ti --rm -v /datasets:/datasets opendronemap/odm --project-path /datasets project [--additional --parameters --here]
|
||||
```
|
||||
|
||||
For example, to generate a DSM (`--dsm`) and increase the orthophoto resolution (`--orthophoto-resolution 2`) :
|
||||
|
||||
**[Download the latest release here](https://github.com/OpenDroneMap/ODM/archive/master.zip)**
|
||||
```bash
|
||||
docker run -ti --rm -v /datasets:/datasets opendronemap/odm --project-path /datasets project --dsm --orthophoto-resolution 2
|
||||
```
|
||||
|
||||
1. Extract and enter the OpenDroneMap directory
|
||||
2. Run `bash configure.sh install`
|
||||
4. Edit the `settings.yaml` file in your favorite text editor. Set the `project-path` value to an empty directory (you will place sub-directories containing individual projects inside). You can add many options to this file, [see here](https://github.com/OpenDroneMap/OpenDroneMap/wiki/Run-Time-Parameters)
|
||||
3. Download a sample dataset from [here](https://github.com/OpenDroneMap/odm_data_aukerman/archive/master.zip) (about 550MB) and extract it as a subdirectory in your project directory.
|
||||
4. Run `./run.sh odm_data_aukerman`
|
||||
5. Enter dataset directory to view results:
|
||||
- orthophoto: odm_orthophoto/odm_orthophoto.tif
|
||||
- textured mesh model: odm_texturing/odm_textured_model_geo.obj
|
||||
- point cloud (georeferenced): odm_georeferencing/odm_georeferenced_model.ply
|
||||
|
||||
See below for more detailed installation instructions.
|
||||
|
||||
## Diving Deeper
|
||||
|
||||
### Installation
|
||||
|
||||
Extract and enter the downloaded OpenDroneMap directory and compile all of the code by executing a single configuration script (requires root privileges):
|
||||
|
||||
bash configure.sh install
|
||||
|
||||
When updating to a newer version of ODM, it is recommended that you run
|
||||
|
||||
bash configure.sh reinstall
|
||||
|
||||
to ensure all the dependent packages and modules get updated.
|
||||
|
||||
For Ubuntu 15.10 users, this will help you get running:
|
||||
|
||||
sudo apt-get install python-xmltodict
|
||||
sudo ln -s /usr/lib/x86_64-linux-gnu/libproj.so.9 /usr/lib/libproj.so
|
||||
|
||||
### Environment Variables
|
||||
|
||||
There are some environmental variables that need to be set. Open the ~/.bashrc file on your machine and add the following 3 lines at the end. The file can be opened with ```gedit ~/.bashrc``` if you are using an Ubuntu desktop environment. Be sure to replace the "/your/path/" with the correct path to the location where you extracted OpenDroneMap:
|
||||
|
||||
export PYTHONPATH=$PYTHONPATH:/your/path/OpenDroneMap/SuperBuild/install/lib/python2.7/dist-packages
|
||||
export PYTHONPATH=$PYTHONPATH:/your/path/OpenDroneMap/SuperBuild/src/opensfm
|
||||
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/your/path/OpenDroneMap/SuperBuild/install/lib
|
||||
|
||||
Note that using `run.sh` sets these temporarily in the shell.
|
||||
|
||||
### Run OpenDroneMap
|
||||
|
||||
First you need a set of images, taken from a drone or otherwise. Example data can be obtained from https://github.com/OpenDroneMap/odm_data
|
||||
|
||||
Next, you need to edit the `settings.yaml` file. The only setting you must edit is the `project-path` key. Set this to an empty directory within projects will be saved. There are many options for tuning your project. See the [wiki](https://github.com/OpenDroneMap/OpenDroneMap/wiki/Run-Time-Parameters) or run `python run.py -h`
|
||||
|
||||
|
||||
Then run:
|
||||
|
||||
python run.py -i /path/to/images project-name
|
||||
|
||||
The images will be copied over to the project path so you only need to specify the `-i /path/` once. You can also override any variable from settings.yaml here using the command line arguments. If you want to rerun the whole thing, run
|
||||
|
||||
python run.py --rerun-all project-name
|
||||
|
||||
or
|
||||
|
||||
python run.py --rerun-from odm_meshing project-name
|
||||
|
||||
The options for rerunning are: 'resize', 'opensfm', 'slam', 'mve', 'odm_meshing', 'mvs_texturing', 'odm_georeferencing', 'odm_orthophoto'
|
||||
|
||||
### View Results
|
||||
## Viewing Results
|
||||
|
||||
When the process finishes, the results will be organized as follows:
|
||||
|
||||
|-- images/
|
||||
|-- img-1234.jpg
|
||||
|-- ...
|
||||
|-- images_resize/
|
||||
|-- img-1234.jpg
|
||||
|-- ...
|
||||
|-- opensfm/
|
||||
|-- see mapillary/opensfm repository for more info
|
||||
|-- depthmaps/
|
||||
|-- merged.ply # Dense Point cloud (not georeferenced)
|
||||
|-- odm_meshing/
|
||||
|-- odm_mesh.ply # A 3D mesh
|
||||
|-- odm_meshing_log.txt # Output of the meshing task. May point out errors.
|
||||
|-- odm_texturing/
|
||||
|-- odm_textured_model.obj # Textured mesh
|
||||
|-- odm_textured_model_geo.obj # Georeferenced textured mesh
|
||||
|-- texture_N.jpg # Associated textured images used by the model
|
||||
|-- odm_georeferencing/
|
||||
|-- odm_georeferenced_model.ply # A georeferenced dense point cloud
|
||||
|-- odm_georeferenced_model.laz # LAZ format point cloud
|
||||
|-- odm_georeferenced_model.csv # XYZ format point cloud
|
||||
|-- odm_georeferencing_log.txt # Georeferencing log
|
||||
|-- odm_georeferencing_transform.txt# Transform used for georeferencing
|
||||
|-- odm_georeferencing_utm_log.txt # Log for the extract_utm portion
|
||||
|-- odm_orthophoto/
|
||||
|-- odm_orthophoto.png # Orthophoto image (no coordinates)
|
||||
|-- odm_orthophoto.tif # Orthophoto GeoTiff
|
||||
|-- odm_orthophoto_log.txt # Log file
|
||||
|-- gdal_translate_log.txt # Log for georeferencing the png file
|
||||
|
||||
You can use the following free and open source software to open the files generated in ODM:
|
||||
* .tif (GeoTIFF): [QGIS](http://www.qgis.org/)
|
||||
* .laz (Compressed LAS): [CloudCompare](https://www.cloudcompare.org/)
|
||||
* .obj (Wavefront OBJ), .ply (Stanford Triangle Format): [MeshLab](http://www.meshlab.net/)
|
||||
|
||||
**Note!** Opening the .tif files generated by ODM in programs such as Photoshop or GIMP might not work (they are GeoTIFFs, not plain TIFFs). Use [QGIS](http://www.qgis.org/) instead.
|
||||
|
||||
Any file ending in .obj or .ply can be opened and viewed in [MeshLab](http://meshlab.sourceforge.net/) or similar software. That includes `opensfm/depthmaps/merged.ply`, `odm_meshing/odm_mesh.ply`, `odm_texturing/odm_textured_model[_geo].obj`, or `odm_georeferencing/odm_georeferenced_model.ply`. Below is an example textured mesh:
|
||||
## API
|
||||
|
||||
You can also view the orthophoto GeoTIFF in [QGIS](http://www.qgis.org/) or other mapping software:
|
||||
ODM can be made accessible from a network via [NodeODM](https://github.com/OpenDroneMap/NodeODM).
|
||||
|
||||

|
||||
## Documentation
|
||||
|
||||
## Build and Run Using Docker
|
||||
See http://docs.opendronemap.org for tutorials and more guides.
|
||||
|
||||
(Instructions below apply to Ubuntu 14.04, but the Docker image workflow
|
||||
has equivalent procedures for Mac OS X and Windows. See [docs.docker.com](https://docs.docker.com/))
|
||||
## Forum
|
||||
|
||||
OpenDroneMap is Dockerized, meaning you can use containerization to build and run it without tampering with the configuration of libraries and packages already
|
||||
installed on your machine. Docker software is free to install and use in this context. If you don't have it installed,
|
||||
see the [Docker Ubuntu installation tutorial](https://docs.docker.com/engine/installation/linux/ubuntulinux/) and follow the
|
||||
instructions through "Create a Docker group". Once Docker is installed, the fastest way to use OpenDroneMap is to run a pre-built image by typing:
|
||||
We have a vibrant [community forum](https://community.opendronemap.org/). You can [search it](https://community.opendronemap.org/search?expanded=true) for issues you might be having with ODM and you can post questions there. We encourage users of ODM to partecipate in the forum and to engage with fellow drone mapping users.
|
||||
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
-v "$(pwd)/odm_texturing:/code/odm_texturing" \
|
||||
opendronemap/odm
|
||||
## Native Install (Ubuntu 16.04)
|
||||
|
||||
If you want to build your own Docker image from sources, type:
|
||||
You can run ODM natively on Ubuntu 16.04 LTS (although we don't recommend it):
|
||||
|
||||
docker build -t my_odm_image --no-cache .
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
-v "$(pwd)/odm_texturing:/code/odm_texturing" \
|
||||
my_odm_image
|
||||
1. Download the source from [here](https://github.com/OpenDroneMap/ODM/archive/master.zip)
|
||||
2. Run `bash configure.sh install`
|
||||
3. Download a sample dataset from [here](https://github.com/OpenDroneMap/odm_data_aukerman/archive/master.zip) (about 550MB) and extract it in `/datasets/aukerman`
|
||||
4. Run `./run.sh --project-path /datasets odm_data_aukerman`
|
||||
|
||||
Using this method, the containerized ODM will process the images in the OpenDroneMap/images directory and output results
|
||||
to the OpenDroneMap/odm_orthophoto and OpenDroneMap/odm_texturing directories as described in the [Viewing Results](https://github.com/OpenDroneMap/OpenDroneMap/wiki/Output-and-Results) section.
|
||||
If you want to view other results outside the Docker image simply add which directories you're interested in to the run command in the same pattern
|
||||
established above. For example, if you're interested in the dense cloud results generated by OpenSfM and in the orthophoto,
|
||||
simply use the following `docker run` command after building the image:
|
||||
### Updating a native installation
|
||||
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_georeferencing:/code/odm_georeferencing" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
my_odm_image
|
||||
When updating to a newer version of ODM, it is recommended that you run
|
||||
|
||||
If you want to get all intermediate outputs, run the following command:
|
||||
bash configure.sh reinstall
|
||||
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_georeferencing:/code/odm_georeferencing" \
|
||||
-v "$(pwd)/odm_meshing:/code/odm_meshing" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
-v "$(pwd)/odm_texturing:/code/odm_texturing" \
|
||||
-v "$(pwd)/opensfm:/code/opensfm" \
|
||||
-v "$(pwd)/mve:/code/mve" \
|
||||
opendronemap/odm
|
||||
to ensure all the dependent packages and modules get updated.
|
||||
|
||||
To pass in custom parameters to the run.py script, simply pass it as arguments to the `docker run` command. For example:
|
||||
### Build From Source
|
||||
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
-v "$(pwd)/odm_texturing:/code/odm_texturing" \
|
||||
opendronemap/odm --resize-to 1800
|
||||
|
||||
If you want to pass in custom parameters using the settings.yaml file, you can pass it as a -v volume binding:
|
||||
|
||||
docker run -it --rm \
|
||||
-v "$(pwd)/images:/code/images" \
|
||||
-v "$(pwd)/odm_orthophoto:/code/odm_orthophoto" \
|
||||
-v "$(pwd)/odm_texturing:/code/odm_texturing" \
|
||||
-v "$(pwd)/settings.yaml:/code/settings.yaml" \
|
||||
opendronemap/odm
|
||||
If you want to rebuild your own docker image (if you have changed the source code, for example), from the ODM folder you can type:
|
||||
|
||||
```bash
|
||||
docker build -t my_odm_image --no-cache .
|
||||
```
|
||||
When building your own Docker image, if image size is of importance to you, you should use the ```--squash``` flag, like so:
|
||||
|
||||
docker build --squash -t my_odm_image .
|
||||
```bash
|
||||
docker build --squash -t my_odm_image .
|
||||
```
|
||||
|
||||
This will clean up intermediate steps in the Docker build process, resulting in a significantly smaller image (about half the size).
|
||||
|
||||
Experimental flags need to be enabled in Docker to use the ```--squash``` flag. To enable this, insert the following into the file ```/etc/docker/daemon.json```:
|
||||
Experimental flags need to be enabled in Docker to use the ```--squash``` flag. To enable this, insert the following into the file `/etc/docker/daemon.json`:
|
||||
|
||||
{
|
||||
"experimental": true
|
||||
}
|
||||
```json
|
||||
{
|
||||
"experimental": true
|
||||
}
|
||||
```
|
||||
|
||||
After this, you must restart docker by typing ```sudo service docker restart``` into your Linux terminal.
|
||||
|
||||
## User Interface
|
||||
|
||||
A web interface and API to OpenDroneMap is currently under active development in the [WebODM](https://github.com/OpenDroneMap/WebODM) repository.
|
||||
|
||||
## Documentation:
|
||||
|
||||
For documentation, see http://docs.opendronemap.org/ and https://github.com/OpenDroneMap/ODM/wiki. Check those places first if you are having problems. There's also help at [community forum](https://community.opendronemap.org/), and if you still need help and think you've found a bug or need an enhancement, look through the issue queue or create one.
|
||||
After this, you must restart docker.
|
||||
|
||||
## Developers
|
||||
|
||||
Help improve our software!
|
||||
Help improve our software! We welcome contributions from everyone, whether to add new features, improve speed, fix existing bugs or add support for more cameras. Check our [code of conduct](https://github.com/OpenDroneMap/documents/blob/master/CONDUCT.md), the [contributing guidelines](https://github.com/OpenDroneMap/documents/blob/master/CONTRIBUTING.md) and [how decisions are made](https://github.com/OpenDroneMap/documents/blob/master/GOVERNANCE.md#how-decisions-are-made).
|
||||
|
||||
For Linux users, the easiest way to modify the software is to make sure docker is installed, clone the repository and then run from a shell:
|
||||
|
||||
|
|
@ -259,4 +139,4 @@ If you have questions, join the developer's chat at https://community.opendronem
|
|||
|
||||
1. Try to keep commits clean and simple
|
||||
2. Submit a pull request with detailed changes and test results
|
||||
3. Have fun!
|
||||
3. Have fun!
|
||||
|
|
|
|||
Ładowanie…
Reference in New Issue