kopia lustrzana https://github.com/OpenDroneMap/ODM
Merge pull request #1173 from smathermather/updateReferenceImage
Update reference imagepull/1176/head
commit
190f13c89c
12
README.md
12
README.md
|
|
@ -7,9 +7,9 @@ An open source command line toolkit for processing aerial drone imagery. ODM tur
|
|||
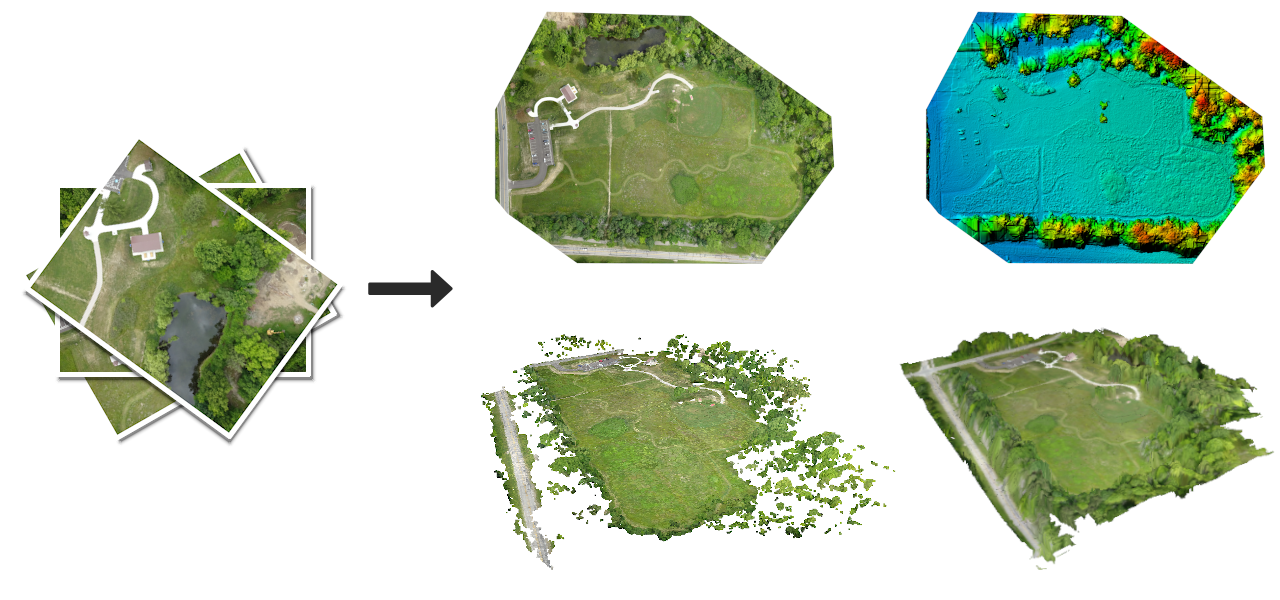
* Georeferenced Orthorectified Imagery
|
||||
* Georeferenced Digital Elevation Models
|
||||
|
||||
|
||||

|
||||
|
||||
The application is available for Windows, Mac and Linux and it works from the command line, making it ideal for power users, scripts and for integration with other software.
|
||||
The application is available for Windows, Mac and Linux and it works from the command line, making it ideal for power users, scripts and for integration with other software.
|
||||
|
||||
If you would rather not type commands in a shell and are looking for a friendly user interface, check out [WebODM](https://github.com/OpenDroneMap/WebODM).
|
||||
|
||||
|
|
@ -55,12 +55,12 @@ When the process finishes, the results will be organized as follows:
|
|||
|-- odm_georeferenced_model.laz # LAZ format point cloud
|
||||
|-- odm_orthophoto/
|
||||
|-- odm_orthophoto.tif # Orthophoto GeoTiff
|
||||
|
||||
|
||||
You can use the following free and open source software to open the files generated in ODM:
|
||||
* .tif (GeoTIFF): [QGIS](http://www.qgis.org/)
|
||||
* .laz (Compressed LAS): [CloudCompare](https://www.cloudcompare.org/)
|
||||
* .obj (Wavefront OBJ), .ply (Stanford Triangle Format): [MeshLab](http://www.meshlab.net/)
|
||||
|
||||
|
||||
**Note!** Opening the .tif files generated by ODM in programs such as Photoshop or GIMP might not work (they are GeoTIFFs, not plain TIFFs). Use [QGIS](http://www.qgis.org/) instead.
|
||||
|
||||
## API
|
||||
|
|
@ -90,7 +90,7 @@ When updating to a newer version of ODM, it is recommended that you run
|
|||
|
||||
bash configure.sh reinstall
|
||||
|
||||
to ensure all the dependent packages and modules get updated.
|
||||
to ensure all the dependent packages and modules get updated.
|
||||
|
||||
### Build From Source
|
||||
|
||||
|
|
@ -119,7 +119,7 @@ After this, you must restart docker.
|
|||
|
||||
## Developers
|
||||
|
||||
Help improve our software! We welcome contributions from everyone, whether to add new features, improve speed, fix existing bugs or add support for more cameras. Check our [code of conduct](https://github.com/OpenDroneMap/documents/blob/master/CONDUCT.md), the [contributing guidelines](https://github.com/OpenDroneMap/documents/blob/master/CONTRIBUTING.md) and [how decisions are made](https://github.com/OpenDroneMap/documents/blob/master/GOVERNANCE.md#how-decisions-are-made).
|
||||
Help improve our software! We welcome contributions from everyone, whether to add new features, improve speed, fix existing bugs or add support for more cameras. Check our [code of conduct](https://github.com/OpenDroneMap/documents/blob/master/CONDUCT.md), the [contributing guidelines](https://github.com/OpenDroneMap/documents/blob/master/CONTRIBUTING.md) and [how decisions are made](https://github.com/OpenDroneMap/documents/blob/master/GOVERNANCE.md#how-decisions-are-made).
|
||||
|
||||
For Linux users, the easiest way to modify the software is to make sure docker is installed, clone the repository and then run from a shell:
|
||||
|
||||
|
|
|
|||
Ładowanie…
Reference in New Issue